REPLACE – entrega rápida de encomendas com estafetas de drones: planeamento, controlo e estimação
Este projeto pretende abordar diversos desafios científicos e tecnológicos com o objetivo de promover a entrega rápida de encomendas em ambientes urbanos usando drones. Como existem severos constrangimentos à autonomia, duração, e alcance na operação de drones, este projeto incorpora explicitamente essas limitações, pretendendo utilizar múltiplos drones em manobras de estafeta, de forma a permitir a entrega de encomendas para além dos limites de um único veículo. Este tipo de operação e manobras, no entanto, coloca enfoque em vários desafios científicos em termos de planeamento ótimo de trajetórias eficientes para uma equipa de drones posicionados em diversos sítios de uma cidade, de controlo cooperativo de vários drones para o transporte e a troca da encomenda entre eles, bem como da estimação da localização dos veículos, da encomenda, e do meio envolvente durante estas manobras. O trabalho de investigação irá começar por abordar estratégias de controlo e estimação para um único veículo, e progressivamente evoluir para planeamento, controlo e estimação cooperativos para o transporte coordenado por estafetas.
Referencias: FCT – PTDC/EEI-AUT/32107/2017; Portugal 2020 – LISBOA-01-0145-FEDER-032107
Financiamento: Fundação para a Ciência e a Tecnologia (FCT), Portugal; Lisboa 2020, Portugal 2020, FEDER.


Parceiros do projeto:
- Instituição principal: Institute for Systems and Robotics – Lisbon (ISR), LARSYS, Associação do Instituto Superior Técnico para a Investigação e o Desenvolvimento (IST-ID).
- Instituição participante: Mechanical Engineering Institute (IDMEC), LAETA.

![]()
![]()
Equipa de investigação: Bruno Guerreiro (PI, ISR/IST), Rita Cunha (Co-PI, ISR/IST), Paulo Oliveira (IDMEC), Carlos Silvestre (ISR/IST)
Objetivos
- Investigação fundamental em robótica e controlo
- Desenvolvimento de novas estratégias para entrega de encomendas em meio urbano:
- Usando um único drone
- Usando múltiplos drones com manobras de troca da encomenda em voo
- Desenho de novos métodos de planeamento, controlo e estimação:
- Eficientes e independentes de sensores e processamento exteriores ao drone
- Usando conceitos de sistemas híbridos de forma a aumentar a robustez
Cenários de aplicação
- Um único drone em ambientes dinâmicos urbanos:
- Enfoque no uso de um drone para levar uma encomenda da origem ao destino
- Localização e mapeamento simultâneos (SLAM) em ambientes dinâmico
- Métodos de controlo com interação com o meio envolvente
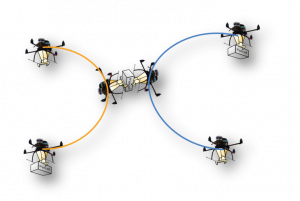
- Múltiplos drones com manobras simples de troca de encomenda:
- Entrega cooperativa de encomendas com manobras simplificadas
- Manobra considerada possível se um drone estiver imediatamente por baixo do outro
- Enfoque em algoritmos distribuídos e preditivos para uso em tempo real
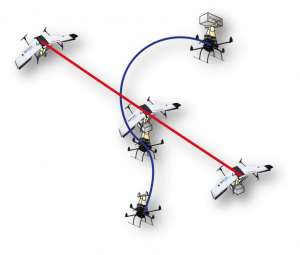
- Múltiplos drones com manobras de troca em espaço 3-D:
- Enfoque em entregas rápidas e cooperativas com manobras de troca optimizadas
- Pode resultar em trajetórias acrobáticas para troca de encomendas
- Desenvolvimento de algoritmos de planeamento e controlo para manobras acrobáticas
Publicações:
- Manuel Simas, Bruno J. Guerreiro, and Pedro Batista. “Preliminary Results on 2-D Simultaneous Localization and Mapping for Aerial Robots in Dynamics Environments.” In 2019 7th International Conference on Robot Intelligence Technology and Applications (RiTA), pp. 180-185. IEEE, 2019. [DOI]
- Marta Marques, Bruno J. Guerreiro, Rita Cunha, and Carlos Silvestre. “Trajectory planning and control for drone replacement for multidrone cinematography.” 21st IFAC Symposium on Automatic Control in Aerospace (ACA 2019), IFAC-PapersOnLine 52, no. 12 (2019): 334-339. [DOI]
- P. Bai, B. Guerreiro, R. Cunha, P. Kornatowski, D. Floreano, and C. Sil-
vestre. “Wall-contact sliding control strategy for a 2D caged quadrotor”. In: 18th International Conference on Control, Automation and Systems (ICCAS). 2018, pp. 291-296. [Preprint] - M. Marques, B. Guerreiro, R. Cunha, and C. Silvestre. “Trajectory planning and control for drone replacement for multidrone cinematography”. In: 21st IFAC Symposium on Automatic Control in Aerospace (ACA2019). accepted. IFAC. 2019. [Preprint]
- M. Marques. “Trajectory planning and control for drone replacement
during formation flight”. Tese de mestrado em Eng. Aeroespecial, Instituto Superior Técnico, 2018.
Oportunidades de emprego:
- Concurso para investigador doutorado
- Bolsa de investigação para mestre/aluno de doutoramento
- Estão disponíveis várias propostas para dissertação de mestrado no âmbito deste projeto, para estudantes do IST dos cursos MEEC, MEAer, MEMec, ou qualquer outro estudante interessado com um excelente CV.